
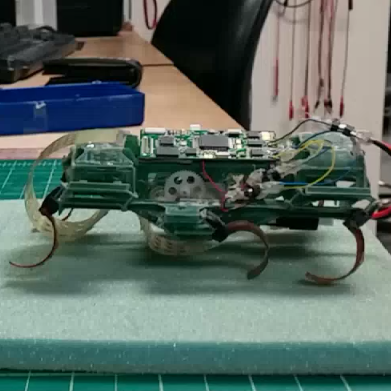
I worked on this project in order to improve the capabilities of the VelociRoACH robot platform. Passive mechanisms, like spines, have the advantage of not adding additional active complexities into the robot. I added spine-like mechanisms onto the robot’s feet, head, and belly out of fiberglass sheets and metal spines.
Through iteration of different gaits and spine-like mechanisms, I was able to get the robot to climb over a step about 60% the height of the robot.
