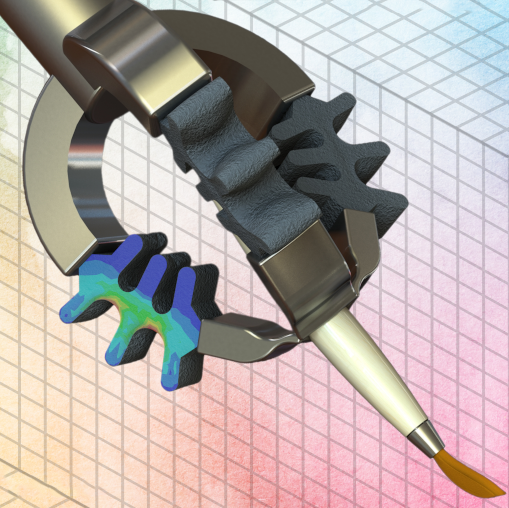
Soft Robotic Joint
Currently, this paper is being published in
Advanced Intelligent Systems with the title of "Computational and Experimental Design Exploration of 3D-Printed Soft Pneumatic Actuators." I worked on designing the parameters, computational methods, and experimental design and data collection for this project.